Allstar Community folk:
After over a year of development (and not done!), I am pleased to announce the Voter2. There is more detail below, but I wanted to begin with the major “headlines” right up front:
- It is fully open-source hardware
- It is fully open-source software
- It is fully compatible with and interoperable with ASL1, ASL3, and Voter/RTCMs.
- It is a ground-up new design using modern silicon
- It has on-board GPS support
The gate for announcing the Voter2 was actually getting one on the air, not just a sandboxed test setup. A Voter2 is now on the air on an experimental repeater for the Colorado Connection—one of the project’s sponsors.
The only major feature not fully coded up is simulcast support. The hardware should be capable, and initial coding is complete to get to sample-level accuracy, not sub-sample yet. Testing/debugging is involved and will take time. Simulcast interoperability will only be between Voter2’s initially in keeping with the “keep the hardware identical for Simulcast” philosophy. Interoperability with Voters is a stretch goal. Outside that there are still things like analog levels and RSSI calibration that need doing as well as many special case features in the Voter that to be honest I need to better understand before even being sure how to support them.
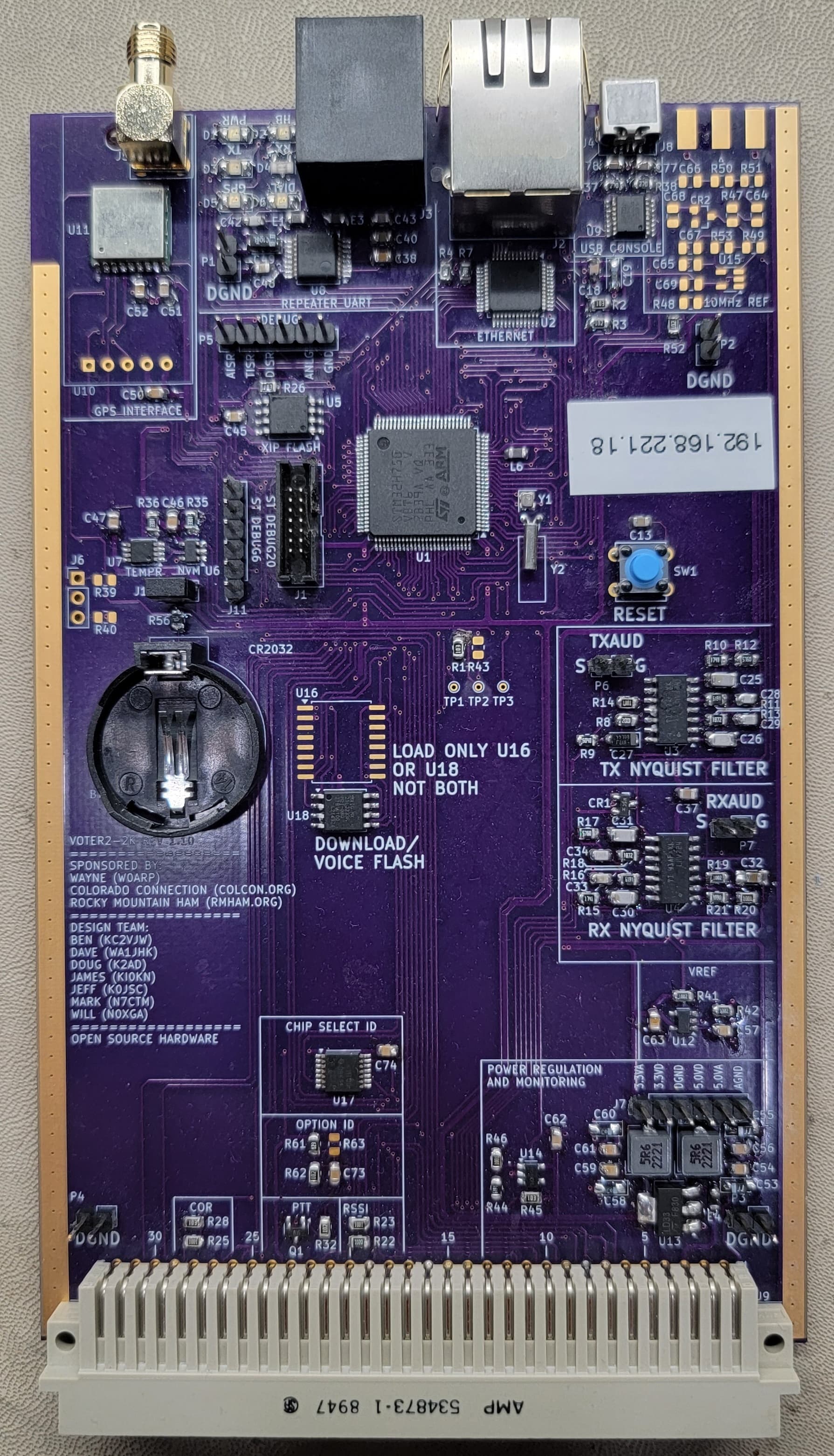
The first physical version of the Voter2 is a plug-in card for the Motorola MTR-2000 repeater. The sponsors really wanted something with fewer wires and “things to go wrong”. There will be a standalone version coming for more general-purpose use. The plan is to see simulcast working to be confident that we have the right hardware before making the standalone version.
The Voter2 project concept began many years ago, but started in earnest during our panic when RTCM production stopped. The Colorado Connection has an 18-repeater network using them. RTCMs are back in production, but the project continued, just not as panicky!
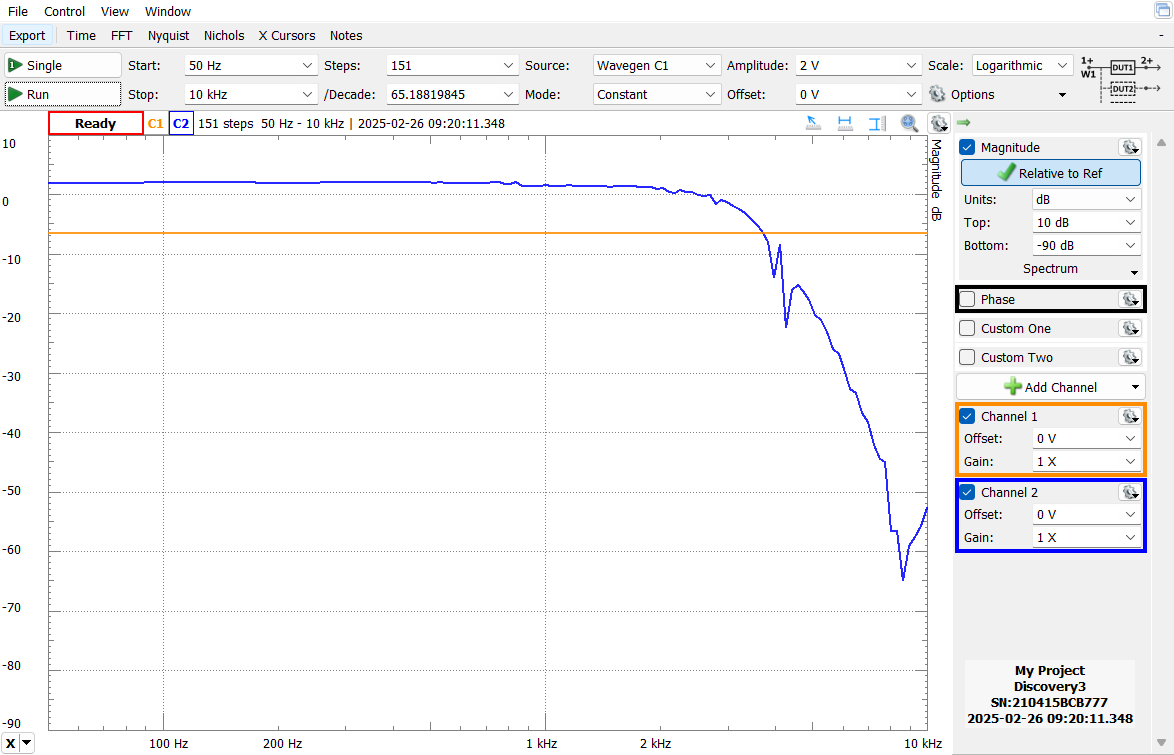
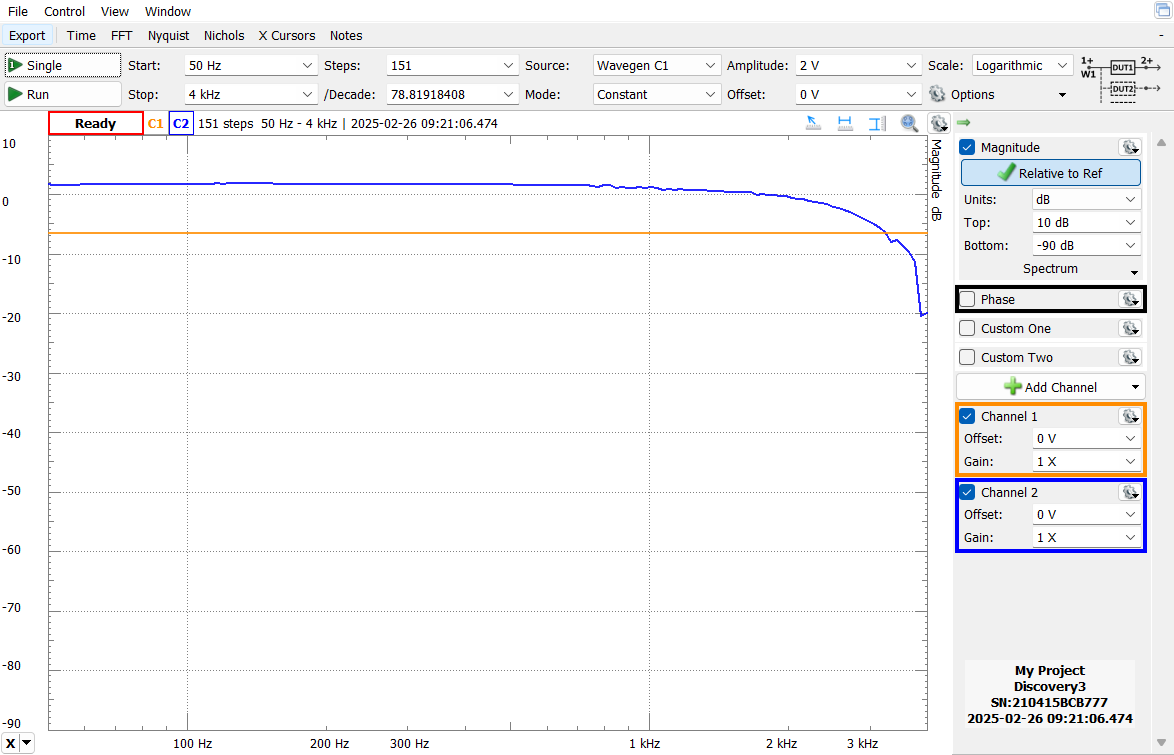
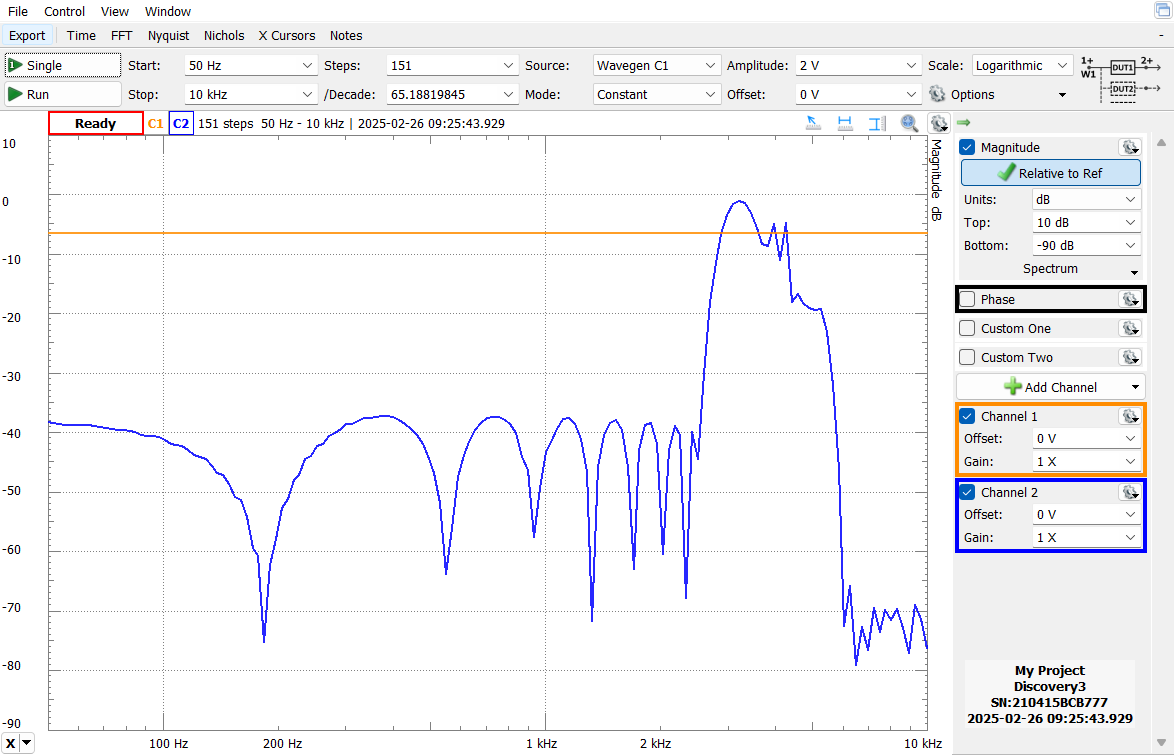
Besides the headline features noted above, the other big feature is expandability. The Voter2 is based on an STM32 Cortex M7 MCU, the STM32H750. It has over 1,000 DMIPS and paired with 1MByte of RAM and a bit over 4MBytes of flash. The baseline feature set is using 10% or less of each of those resources, so ready for the future. The only analog filters are Nyquist filters for Rx and TX audio. All other audio filtering is DSP based.
The Voter2 makes use of two big open-source projects, FreeRTOS and LwIP. While I have no illusions that the current state of the Voter2 is as reliable and bullet-proof as the Voter/RTCM, using these projects provides a good foundation. FreeRTOS will allow much more structured and maintainable code and LwIP provides a robust IP interface.
There are directories for each hardware and firmware revision. Each hardware directory has the KiCAD design files and its paired hardware reference manual. Each firmware directory will have the STM32CubeIDE project tree and paired software users guide. The DUT board directory is only if you want to do development work without using a repeater, and finally the Other Docs directory is for other supporting documentation not tied to a specific hardware or firmware revision. There are no known hardware issues, but I do plan on one more board spin to clean things up a bit.
Do note that while the Voter2 is fully compatible and interoperable with the Voter/RTCM, that is for the protocol. The UI is quite different, it is command line based versus menu based. This allows better feature expansion and segmentation.
The Voter2 does have one neat feature above the baseline Voter/RTCM. It supports a subset of the RFC2217 “UART over Telnet” protocol that allows you to remotely configure the MTR-2000 over Ethernet. This actually works with the ancient Motorola RSS software! Setting up the drivers on 32-bit Windows XP is a bit tricky (details are in the Firmware Users guide), but do work and MUCH easier than a site visit. I suspect there are better drivers with easier setup, but the feature at least works.
In addition to being fully open-source, Dave Maciorowski, WA1JHK, of SCOM and JHK Labs (https://jhk-labs.com) also plans on offering ready-built and tested Voter2s if you prefer not to build one yourself. He is a core part of the development team. The reality of any non-trivial silicon for the past decade is that we are stuck with surface-mount parts and this board reflects that. In addition to Voter2s, Dave is also is porting a version of the 7330 controller firmware to a modified Voter2 platform called the 7110e that will clearly not be open source. Here’s a video that introduces the products that Dave showed at Hamvention 2025: https://www.youtube.com/watch?v=8kUs3bc9kRM
On timeframe, getting on the air was a major step. Voting works in a sandbox environment, but yet to be confirmed “in the wild”. Multiply that by 10 for real-world simulcast testing. Initially, the Voter2 will definitely NOT be as robust as the Voter/RTCM which has millions of on-air hours. There will be bugs and “errors of assumption” to iron out over the next months. If simulcast isn’t a need, then I could see some early adopters trying out Voter2 by the end of this year or early next year.
On the build-it-yourself cost, the “Quantity 10-ish” pricing based on DigiKey and a US PCB supplier is about $125 (plus taxes, tariffs, and shipping). A costed BOM with DigiKey part numbers is in the KiCAD directory. Much cheaper PCBs can be sourced from China (JLCPCB in particular), and DigiKey’s fame is reliable sourcing and quality more than lowest cost.
will (N0XGA)